






The RMR lidar at Kühlungsborn
The Rayleigh-Mie-Raman lidar (RMR lidar) at Kühlungsborn is used for observation of temperatures and aerosol parameters of the atmosphere. The lidar is optimized for soundings during the day and measures the following quantities:
- temperatures between 3 and 90 km during the night and 30-75 km during the day
- NLC during night and day
- stratospheric aerosols up to 40 km altitude during the night
2021 a new and modern RMR lidars starts operation to measure horizontal winds during the night between about 15 and 75 km altitude. The sounding principle for wind detection equals the RMR lidar at ALOMAR.
The first RMR lidar has been in use already between 1997 and 2013, measuring the following quantities:
- nightly temperatures between 1 and 90 km altitude
- nightly Noctilucent Clouds (NLC)
- troposperic and stratospheric aerosols during day and night
All soundings are performed on a routine basis whenever weather allows. The RMR-lidars is switched on manually, while the remaining operation is widely automized. No local operator is needed and the lidar can also be run fully software controlled. By this, 1200 to 1500 hours of data are aquired per year.
Especially the temperature and NLC soundings are unique. Together with the ALOMAR RMR lidar, the lidar at Kühlungsborn is the most powerful lidar in the world for mesospheric observation during daylight. Below we describe the most important parts of the lidar. The principle of Rayleigh temperature retrieval is explained here.
The sending branch
The lidar sender mainly constists of an injection-seeded Nd:YAG laser with 30 pps and ~700 mJ pulse energy at 532 nm. The seed laser is locked to an iodine absorption line. By this, the long-term wavelength drift also of the pulsed laser is much below 0.1 pm. A 10x beam widening telescope is used to reduce the beam divergence to ~50 μrad. Behind that, different mirrors are used to guide the beam into the atmosphere. One of these mirrors is equipped with a fast and precise Piezo-mount, enabling an effective beam stabilisation. The beam stabilisation is required to guarantee the alignment between laser beam and receiver telescope field of view (FOV). The FOV is only ~60 μrad (~0.003°) and a misalignment may happen fast due to atmospheric turbulence and thermal drifts of the mirrors. Without beam stabilisation typically the alignment is lost completely after only a few minutes. For avoiding this the beam position is measured for every laser pulse by a CCD camera in the telecope. Differences from the desired position are measured and corrected within only a few milliseconds, i.e., before the next laser pulse.
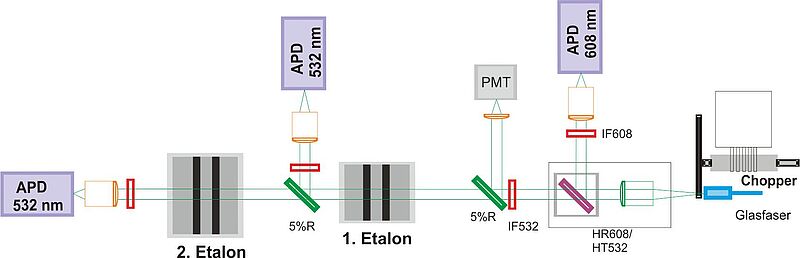
The receiver branch
The receiver branch of the RMR lidar mainly consists of a 80 cm telescope with a focal length of ~3.2 m. The telescope serves simultaneously for lidar detection (90% of backscatter) and for beam stabilisation (10%). The FOV of the system is limited to ~60 μrad by a 0.2 mm quarz fiber. By the small FOV only limited amount of skylight is received - one of the prerequisites for daytime soundings.
The received light is collimated behind the fiber and passes different optical filters. These further reduce the unwanted skylight. Different filters are used:
- interference filter with 130 pm spectral width,
- first Fabry-Perot etalon with 4 pm spectral width,
- second Fabry-Perot etalon with 4.5 pm spectral width.
The combination of small FOV and spectral filtering reduces the background by 1:10000, allowing for daytime soundings of temperatures up to 75 km altitude and detection of even weak NLC.
Selected publications
- M. Gerding, G. Baumgarten, M. Zecha, F.-J. Lübken, K. Baumgarten und R. Latteck, On the unusually bright and frequent noctilucent clouds in summer 2019 above Northern Germany, J. Atmos. Solar-Terr. Phys., 217, doi:10.1016/j.jastp.2021.105577, 2021.
- K. Baumgarten, M. Gerding, G. Baumgarten und F.-J. Lübken, Temporal variability of tidal and gravity waves during a record long 10 day continuous lidar sounding, Atmos. Chem. Phys., 18, 371-384, doi:10.5194/acp-18-371-2018, 2018.
- M. Gerding, M. Kopp, J. Höffner, K. Baumgarten und F.-J. Lübken, Mesospheric temperature soundings with the new, daylight-capable IAP RMR lidar, Atmos. Meas. Tech., 9(8), 3707-3715, doi:10.5194/amt-9-3707-2016, 2016.
- R. Eixmann, M. Gerding, J. Höffner und M. Kopp, Lidars with narrow FOV for spectral and daylight measurements, IEEE Transactions on Geoscience and Remote Sensing, 53, 4548-4553, doi:10.1109/TGRS.2015.2401333, 2015.